7.1 障碍方法
这个 notebook 与第7章第1部分“障碍方法”对应,重点观察:
对数障碍函数如何把不等式约束变成光滑惩罚项;
中心点 如何随障碍参数 增大而靠近原问题最优解;
误差界 在一个二维线性规划例子中的表现;
障碍方法如何通过外层更新 逐步提高精度。
import numpy as np
import matplotlib.pyplot as plt
import cvxpy as cp
from IPython.display import HTML, display
plt.rcParams["font.sans-serif"] = [
"Arial Unicode MS",
"PingFang SC",
"Heiti TC",
"Microsoft YaHei",
"SimHei",
]
plt.rcParams["axes.unicode_minus"] = False
def print_large(text):
display(HTML(f'<font size="3">{text}</font>'))u_grid = np.linspace(-3.0, -1.0e-3, 1000)
plt.figure(figsize=(4, 2.5))
colors = ["#e11d48", "#d97706", "#0f766e", "#2563eb"]
for t, color in zip([0.5, 1.0, 2.0, 5.0], colors):
plt.plot(u_grid, -np.log(-u_grid) / t, color=color, linewidth=2,
label=rf"$t={t:g}$")
plt.axhline(0, color="#475569", linestyle="--", linewidth=1)
plt.axvline(0, color="#475569", linestyle="--", linewidth=1)
plt.xlim([-3, 0.5])
plt.ylim([-1, 12])
plt.xlabel(r"$u=f_i(x)$", size=12)
plt.ylabel(r"$-\log(-u)/t$", size=12)
plt.title("对数障碍函数", size=14)
plt.legend(loc="upper left", ncol=2, fontsize=12, frameon=True)
plt.grid(alpha=0.25)
plt.tight_layout()
plt.show()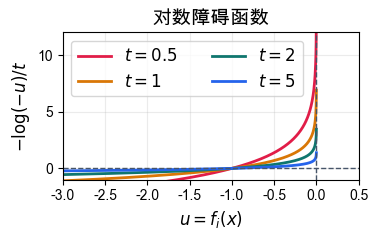
观察结果:
对数障碍只在 上有定义,所以算法天然会在严格可行域内部工作。
越靠近边界 ,函数值越大,相当于给边界附近加上一堵“软墙”。
当 变大时, 的整体高度变低,因此障碍子问题会更接近原问题。
c = np.array([8.0, 5.0])
A = np.array([[1.0, 1.0]])
b = np.array([1.0])
z_star = np.array([0.5, 0.5])
p_star = c @ z_star
m = 4
def objective_value(z):
return c @ z
def margins(z):
# Positive margins h_i(z); constraints are h_i(z) >= 0.
x, y = z
return np.array([
60.0 * x + 40.0 * y - 50.0,
20.0 * x + 10.0 * y - 15.0,
x,
1.0 - x,
])
def solve_barrier_subproblem(t, z_start=None):
z = cp.Variable(2)
if z_start is not None:
z.value = z_start
x, y = z[0], z[1]
h = cp.hstack([
60.0 * x + 40.0 * y - 50.0,
20.0 * x + 10.0 * y - 15.0,
x,
1.0 - x,
])
objective = cp.Minimize(t * c @ z - cp.sum(cp.log(h)))
problem = cp.Problem(objective, [A @ z == b])
try:
problem.solve(solver=cp.CLARABEL, warm_start=True)
except cp.SolverError:
problem.solve(warm_start=True)
if problem.status not in [cp.OPTIMAL, cp.OPTIMAL_INACCURATE] or z.value is None:
raise RuntimeError(f"Barrier subproblem failed for t={t}: {problem.status}")
z_value = np.asarray(z.value, dtype=float)
return z_value, objective_value(z_value)mu = 3
t_list = mu ** np.arange(0, 12)
center_points = np.zeros((len(t_list), 2))
objective_values = np.zeros(len(t_list))
for i, t in enumerate(t_list):
center_points[i], objective_values[i] = solve_barrier_subproblem(float(t))
objective_gaps = objective_values - p_star
if np.min(objective_gaps) < -1.0e-8:
raise RuntimeError("Objective gap should be nonnegative; check solver accuracy.")
gap_bound = m / t_list
coordinate_errors = np.abs(center_points - z_star)
print_large(f"共求解 {len(t_list)} 个障碍子问题")
print_large(f"第一个中心点 = {np.round(center_points[0], 6)}")
print_large(f"最后一个中心点 = {np.round(center_points[-1], 6)}")
print_large(f"最后一个目标函数误差 = {objective_gaps[-1]:.3e}")Loading...
Loading...
Loading...
Loading...
plt.figure(figsize=(9.6, 2.8))
plt.subplot(1, 3, 1)
plt.plot(t_list, objective_gaps, "o-", color="#2563eb",
linewidth=2, markersize=5, label="数值误差")
plt.plot(t_list, gap_bound, "--", color="#e11d48",
linewidth=2, label=r"理论上界 $m/t$")
plt.xscale("log")
plt.yscale("log")
plt.xlabel(r"$t$", size=12)
plt.ylabel("误差", size=12)
plt.title("目标函数误差", size=14)
plt.grid(alpha=0.25, which="both")
plt.legend(loc="lower left", fontsize=12, frameon=True)
plt.subplot(1, 3, 2)
plt.plot(t_list, coordinate_errors[:, 0], "o-", color="#0f766e",
linewidth=2, markersize=5, label=r"$|x(t)-0.5|$")
plt.plot(t_list, coordinate_errors[:, 1], "s--", color="#d97706",
linewidth=2, markersize=5, label=r"$|y(t)-0.5|$")
plt.xscale("log")
plt.yscale("log")
plt.xlabel(r"$t$", size=12)
plt.ylabel("误差", size=12)
plt.title("坐标误差", size=14)
plt.grid(alpha=0.25, which="both")
plt.legend(loc="lower left", fontsize=12, frameon=True)
plt.subplot(1, 3, 3)
plt.plot(center_points[:, 0], center_points[:, 1], "o-", color="#0f766e",
linewidth=2, markersize=5, label="中心路径")
plt.scatter(z_star[0], z_star[1], marker="*", s=150, color="#e11d48",
edgecolor="white", linewidth=0.8, zorder=5, label="原最优解")
plt.xlim(0.47, 0.82)
plt.ylim(0.18, 0.53)
plt.gca().set_aspect("equal", adjustable="box")
plt.xlabel(r"$x$", size=12)
plt.ylabel(r"$y$", size=12)
plt.title("中心路径", size=14)
plt.grid(alpha=0.25)
plt.legend(loc="lower left", fontsize=12, frameon=True)
plt.tight_layout()
plt.show()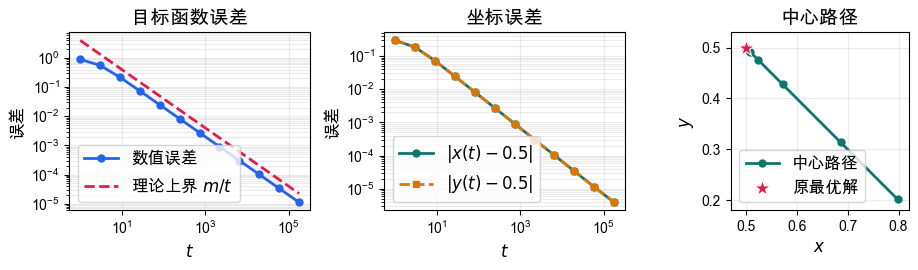
观察结果:
随着 增大,中心点沿着严格可行域内部靠近 。
目标函数误差始终低于理论界 。
坐标误差也随 增大而下降,但理论界直接控制的是目标函数值误差。
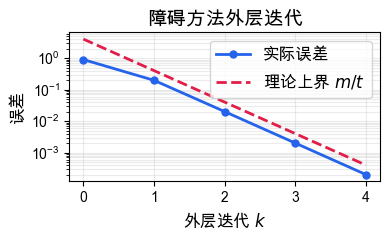
4. 障碍方法的外层迭代¶
现在把中心路径真正串起来:从一个严格可行点出发,求当前 下的中心点; 然后把这个中心点作为下一轮的初始点,并令 。
这里仍然直接处理二维变量 ,并用 cvxpy 求解每个障碍子问题。
外层迭代只保留最关键的信息:中心点、实际误差和理论上界 。
t = 1.0
mu_path = 10.0
epsilon = 1.0e-3
z_start = np.array([0.75, 0.25])
barrier_history = []
while True:
z_center, objective_at_center = solve_barrier_subproblem(t, z_start)
gap = objective_at_center - p_star
bound = m / t
barrier_history.append([
len(barrier_history), t, z_center[0], z_center[1], gap, bound,
])
if bound <= epsilon:
break
z_start = z_center
t *= mu_path
barrier_history = np.array(barrier_history, dtype=float)
print(" k t x(t) y(t) gap m/t")
for row in barrier_history:
print(
f"{int(row[0]):2d} {row[1]:8.0f} {row[2]:8.5f} "
f"{row[3]:8.5f} {row[4]:8.2e} {row[5]:8.2e}"
)
plt.figure(figsize=(4, 2.5))
plt.semilogy(barrier_history[:, 0], barrier_history[:, 4], "o-",
color="#2563eb", linewidth=2, markersize=5, label="实际误差")
plt.semilogy(barrier_history[:, 0], barrier_history[:, 5], "--",
color="#e11d48", linewidth=2, label=r"理论上界 $m/t$")
plt.xlabel("外层迭代 $k$", size=12)
plt.ylabel("误差", size=12)
plt.title("障碍方法外层迭代", size=14)
plt.grid(alpha=0.25, which="both")
plt.legend(fontsize=12, frameon=True)
plt.tight_layout()
plt.show() k t x(t) y(t) gap m/t
0 1 0.79829 0.20171 8.95e-01 4.00e+00
1 10 0.56550 0.43450 1.97e-01 4.00e-01
2 100 0.50667 0.49333 2.00e-02 4.00e-02
3 1000 0.50067 0.49933 2.00e-03 4.00e-03
4 10000 0.50007 0.49993 2.00e-04 4.00e-04
总结¶
这个 notebook 验证或强调了四件事:
对数障碍函数把边界变成光滑但非常陡峭的惩罚项,因此迭代点留在严格可行域内部。
中心点 随 增大逐渐靠近原问题的最优解。
目标函数误差满足 ,二维例子中的数值结果与理论一致。
障碍方法通过逐步增大 ,用一串较容易求解的子问题逼近原问题。