6.1 等式约束的牛顿法
import numpy as np
import cvxpy as cp
import matplotlib.pyplot as pltclass EqualityConstrainedProblem:
# 将目标函数、导数、Hessian 和等式约束 Ax=b 封装在同一个类中。
def __init__(self, f, df, hess, A, b, is_in_domain=None):
# is_in_domain 用来检查目标函数定义域;本例中要求所有坐标都为正。
self.f = f
self.df = df
self.hess = hess
self.A = np.asarray(A, dtype=float)
self.b = np.asarray(b, dtype=float)
self.p, self.n = self.A.shape
self.is_in_domain = is_in_domain or (lambda x: True)
# 约束数量必须和 b 的长度一致。
if self.b.shape != (self.p,):
raise ValueError("b must have shape (p,).")
def newton_step(self, x, nu=None):
# 求解课件中的 KKT 线性方程组,得到 Newton 方向。
# 可行初始点方法只需要 dx;不可行初始点方法还需要 dnu。
if not self.is_in_domain(x):
raise ValueError("Newton step is only defined inside the domain of f.")
n = self.n
p = self.p
# KKT 矩阵为 [[H, A^T], [A, 0]],其中 H 是 Hessian。
kkt_matrix = np.zeros((n + p, n + p))
kkt_matrix[:n, :n] = self.hess(x)
kkt_matrix[:n, n:] = self.A.T
kkt_matrix[n:, :n] = self.A
# 右端向量对应 [-grad f(x), b - A x]。
rhs = np.zeros(n + p)
rhs[:n] = -self.df(x)
rhs[n:] = self.b - self.A @ x
solution = np.linalg.solve(kkt_matrix, rhs)
dx = solution[:n]
omega = solution[n:]
if nu is not None:
# 不可行初始点方法中,KKT 解给出 omega = nu + dnu。
return dx, omega - nu
return dx
def primal_residual(self, x):
# 衡量当前点违反等式约束 Ax=b 的程度。
return np.linalg.norm(self.A @ x - self.b)
def backtracking_line_search(self, x, dx, alpha, beta, max_line_search=100):
# Armijo 回溯线搜索:既要求函数下降,也要求试探点仍在定义域内。
fx = self.f(x)
directional_derivative = np.dot(self.df(x), dx)
t = 1.0
for k in range(max_line_search + 1):
xt = x + t * dx
if self.is_in_domain(xt):
# 先检查定义域,再计算 f(xt),避免 log 遇到非正数。
sufficient_decrease = self.f(xt) <= fx + alpha * t * directional_derivative
if sufficient_decrease:
return t, k
t *= beta
raise RuntimeError("Line search failed to find a domain-feasible step.")
def newton_with_linear_constraint(self, x, alpha, beta, epsilon, maxiter=100):
# 可行初始点 Newton 法:要求初始点已经满足 Ax=b。
x = np.asarray(x, dtype=float).copy()
if self.primal_residual(x) > 1.0e-10:
raise ValueError("Feasible-start Newton needs A @ x == b.")
x_list = [x.copy()]
for _ in range(maxiter):
dx = self.newton_step(x)
# Newton decrement 的平方:lambda(x)^2 = dx^T H dx。
lambda_sq = np.dot(dx, self.hess(x) @ dx)
if lambda_sq / 2 <= epsilon:
break
# 因为 A dx=0,任意步长都会保持 Ax=b;线搜索只负责下降和定义域。
t, _ = self.backtracking_line_search(x, dx, alpha, beta)
x = x + t * dx
x_list.append(x.copy())
return x, x_list
def r(self, x, nu):
# 原对偶残差 r(x, nu),同时包含驻点误差和可行性误差。
if not self.is_in_domain(x):
return np.inf
residual = (
np.linalg.norm(self.df(x) + self.A.T @ nu) ** 2
+ self.primal_residual(x) ** 2
)
return np.sqrt(residual)
def newton_with_infeasible_start(
self, x, nu, alpha, beta, epsilon, eta=None, maxiter=100, max_line_search=100
):
# 不可行初始点 Newton 法:x 不必满足 Ax=b,但必须在 f 的定义域内。
# eta 是单独的可行性阈值;若不指定,则默认和 epsilon 相同。
eta = epsilon if eta is None else eta
x = np.asarray(x, dtype=float).copy()
nu = np.asarray(nu, dtype=float).copy()
x_list = [x.copy()]
nu_list = [nu.copy()]
for _ in range(maxiter):
r0 = self.r(x, nu)
# 同时检查 KKT 残差和等式约束残差,对应课件中的两个停止条件。
if r0 <= epsilon and self.primal_residual(x) <= eta:
break
dx, dnu = self.newton_step(x, nu=nu)
t = 1.0
for _ in range(max_line_search + 1):
xt = x + t * dx
nut = nu + t * dnu
if self.is_in_domain(xt):
# 这里用残差下降作为线搜索标准,而不是直接比较目标函数值。
residual_decrease = self.r(xt, nut) <= (1 - alpha * t) * r0
if residual_decrease:
break
t *= beta
else:
raise RuntimeError(
"Line search failed to find a domain-feasible residual-decreasing step."
)
x = x + t * dx
nu = nu + t * dnu
x_list.append(x.copy())
nu_list.append(nu.copy())
return x, x_list, nu, nu_listnp.random.seed(1)
n = 500
p = 100
A = np.random.rand(p, n)
assert np.linalg.matrix_rank(A) == p, "Not full rank"
x0 = np.random.rand(n)
b = A @ x0先使用cvxpy来求解¶
cp_x = cp.Variable(n)
constraints = [A @ cp_x == b]
obj = cp.Minimize(-cp.sum(cp.log(cp_x)))
cvx_prob = cp.Problem(obj, constraints)
cvx_prob.solve()
print("status:", cvx_prob.status)
print("optimal value = {:.4f}".format(cvx_prob.value))status: optimal
optimal value = 351.0778
使用等式约束的牛顿法¶
alpha = 0.1
beta = 0.5
tol = 1.0e-7
eta = 1.0e-8
def is_positive(x):
# log barrier 的定义域:每个坐标都必须大于 0。
return np.all(x > 0)
def f(x):
# 目标函数 f(x) = -sum log(x_i),定义域外返回无穷大。
if not is_positive(x):
return np.inf
return -np.sum(np.log(x))
def df(x):
# 梯度:第 i 个分量为 -1 / x_i。
return -1/x
def hess(x):
# Hessian 是对角矩阵,第 i 个对角元为 1 / x_i^2。
return np.diag(1/x**2)
problem = EqualityConstrainedProblem(f, df, hess, A, b, is_in_domain=is_positive)
final_x_ln, x_list_ln = problem.newton_with_linear_constraint(x0, alpha, beta, tol)
p_star_ln = f(final_x_ln)
print("Optimal value = {:.4f}".format(p_star_ln))
print("Iterations = {}".format(len(x_list_ln) - 1))
print("Final feasibility residual = {:.2e}".format(problem.primal_residual(final_x_ln)))
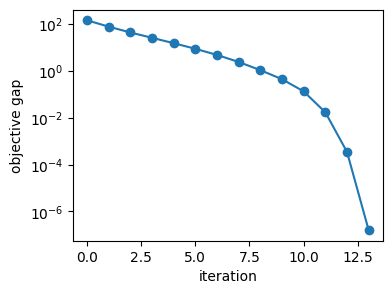
plt.figure(figsize=(4,3))
objective_gaps = [max(f(item) - p_star_ln, np.finfo(float).tiny) for item in x_list_ln[:-1]]
plt.semilogy(objective_gaps, 'o-')
plt.xlabel("iteration")
plt.ylabel("objective gap")Optimal value = 351.0778
Iterations = 14
Final feasibility residual = 6.07e-13
使用不可行初始点牛顿法¶
x0_infeasible = 0.5 * x0 + 0.1
nu0 = np.random.randn(p)
print("Initial feasibility residual = {:.2e}".format(problem.primal_residual(x0_infeasible)))
final_x_pd, x_list_pd, final_nu_pd, nu_list_pd = problem.newton_with_infeasible_start(
x0_infeasible, nu0, alpha, beta, tol, eta=eta
)
p_star_pd = f(final_x_pd)
print("Optimal value = {:.4f}".format(p_star_pd))
print("Iterations = {}".format(len(x_list_pd) - 1))
print("Final KKT residual = {:.2e}".format(problem.r(final_x_pd, final_nu_pd)))
print("Final feasibility residual = {:.2e}".format(problem.primal_residual(final_x_pd)))
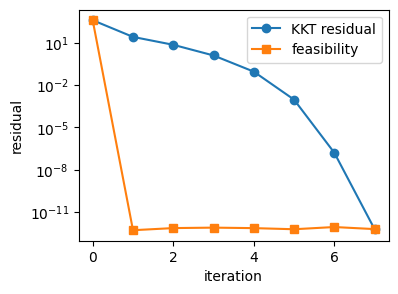
plt.figure(figsize=(4,3))
kkt_residuals = [problem.r(x, nu) for x, nu in zip(x_list_pd, nu_list_pd)]
feasibility_residuals = [problem.primal_residual(x) for x in x_list_pd]
plt.semilogy(kkt_residuals, 'o-', label="KKT residual")
plt.semilogy(feasibility_residuals, 's-', label="feasibility")
plt.xlabel("iteration")
plt.ylabel("residual")
plt.legend()Initial feasibility residual = 3.86e+02
Optimal value = 351.0778
Iterations = 7
Final KKT residual = 6.32e-13
Final feasibility residual = 6.32e-13
def relative_error(x, x_ref):
return np.linalg.norm(x - x_ref) / np.linalg.norm(x_ref)
print("Compare cvxpy and newton (with linear constraints)")
print("Relative error of optimal x = {:.1E}".format(relative_error(final_x_ln, cp_x.value)))
print("Minimum coordinate of x = {:.2e}\n".format(np.min(final_x_ln)))
print("Compare cvxpy and newton (with infeasible start)")
print("Relative error of optimal x = {:.1E}".format(relative_error(final_x_pd, cp_x.value)))
print("Minimum coordinate of x = {:.2e}".format(np.min(final_x_pd)))Compare cvxpy and newton (with linear constraints)
Relative error of optimal x = 9.1E-07
Minimum coordinate of x = 2.84e-01
Compare cvxpy and newton (with infeasible start)
Relative error of optimal x = 9.1E-07
Minimum coordinate of x = 2.84e-01