3.2 牛顿法
这个 notebook 与第3章第3部分的课件对应,重点观察:
牛顿法如何利用二阶信息产生方向
阻尼牛顿法与纯牛顿阶段的区别
为什么牛顿法在极小值点附近通常比梯度下降更快
在开始前,可以先思考两个问题:
对二次函数来说,如果我们已经知道曲率矩阵 ,为什么用 来缩放梯度可能更合理?
在梯度下降法里,为什么条件数大时会出现之字形轨迹?
import os
import time
import matplotlib.pyplot as plt
import numpy as np
from IPython.display import HTML, display
os.makedirs('assets', exist_ok=True)
plt.rcParams['font.sans-serif'] = ['Arial Unicode MS', 'PingFang SC', 'Heiti TC', 'SimHei']
plt.rcParams['axes.unicode_minus'] = False
print_large = lambda text: display(HTML(f'<font size="3">{text}</font>'))
class Problem:
def __init__(self, dim=2, alpha=0.1, beta=0.8, f=None, df=None, hessian=None):
self.dim = dim
self.alpha = alpha
self.beta = beta
self.tol = 1.0e-8
self.ref_state = None
self.condition = 'grad'
self.P = np.eye(dim)
self.method = 'gradient' # gradient or newton
self.f = f
self.df = df
self.hessian = hessian
def backtracking_line_search(self, x, d):
t = 1.0
k = 0
fx = self.f(x)
directional_derivative = np.dot(self.df(x), d)
while self.f(x + t * d) > fx + self.alpha * t * directional_derivative:
t *= self.beta
k += 1
return t, k
def gradient_propose(self, x):
if self.method == 'gradient':
matrix = self.P
elif self.method == 'newton':
matrix = self.hessian(x)
else:
raise ValueError('method must be gradient or newton')
return -np.linalg.solve(matrix, self.df(x))
def newton_decrement(self, x):
hess = self.hessian(x)
grad = self.df(x)
return np.sqrt(grad @ np.linalg.solve(hess, grad))
def stop_condition(self, x):
if self.condition == 'ref_state':
return np.linalg.norm(x - self.ref_state) < self.tol
if self.condition == 'grad':
return np.linalg.norm(self.df(x)) < self.tol
if self.condition == 'newton_decrement':
return self.newton_decrement(x) ** 2 / 2 <= self.tol
raise ValueError('unknown stopping condition')
def solve(self, x0, max_iter=100):
t_begin = time.time()
x = x0.astype(float).copy()
trajectory = [x.copy()]
t_list = []
decrement_list = []
for _ in range(max_iter):
if self.method == 'newton':
decrement_list.append(self.newton_decrement(x))
d = self.gradient_propose(x)
t, _ = self.backtracking_line_search(x, d)
x = x + t * d
t_list.append(t)
trajectory.append(x.copy())
if self.stop_condition(x):
break
if self.method == 'newton':
decrement_list.append(self.newton_decrement(x))
runtime = time.time() - t_begin
return np.array(trajectory), runtime, t_list, decrement_list
def plot_contour(self, xmin, xmax, ymin, ymax):
grid_x = np.linspace(xmin, xmax, 400)
grid_y = np.linspace(ymin, ymax, 300)
grid_X, grid_Y = np.meshgrid(grid_x, grid_y)
Z = np.zeros_like(grid_X)
for i in range(grid_X.shape[0]):
for j in range(grid_X.shape[1]):
Z[i, j] = self.f(np.array([grid_X[i, j], grid_Y[i, j]]))
contour = plt.contourf(grid_X, grid_Y, Z, levels=20, cmap='Blues')
plt.colorbar(contour)
plt.xlabel(r'$x_1$', fontsize=12)
plt.ylabel(r'$x_2$', fontsize=12)
def f_1d(x):
return x - np.log(x)
def df_1d(x):
return 1.0 - 1.0 / x
def ddf_1d(x):
return 1.0 / x**2
x0 = 0.5
alpha = 0.5
beta = 0.7
max_iter = 8
x_values = [x0]
t_values = []
error_values = [abs(x0 - 1.0)]
x = x0
for _ in range(max_iter):
d = -df_1d(x) / ddf_1d(x)
t = 1.0
while f_1d(x + t * d) > f_1d(x) + alpha * t * df_1d(x) * d:
t *= beta
x = x + t * d
x_values.append(x)
t_values.append(t)
error_values.append(abs(x - 1.0))
print_large(f'初值 x^(0) = {x0:.2f}')
print_large(f'迭代步数 = {len(x_values) - 1}')
print_large(f'所有回溯步长 t_k = {t_values}')
print_large(f'最后一步误差 |x_k - x^*| = {error_values[-1]:.3e}')
for k in range(len(error_values) - 1):
print(f'k={k}: e_(k+1) = {error_values[k + 1]:.2e}, e_k^2 = {error_values[k]**2:.2e}')
plt.figure(figsize=(10, 3.0))
plt.subplot(1, 3, 1)
grid = np.linspace(0.2, 1.3, 400)
plt.plot(grid, f_1d(grid), label=r'$f(x)=x-\log x$')
plt.plot(x_values, [f_1d(item) for item in x_values], 'ro-')
plt.axvline(1.0, color='k', linestyle='--', label=r'$x^*=1$')
plt.title('一维牛顿迭代轨迹', fontsize=14)
plt.xlabel('x', fontsize=12)
plt.legend(fontsize=10)
plt.grid()
plt.subplot(1, 3, 2)
plt.plot(range(len(t_values)), t_values, 'o-')
plt.ylim(0, 1.05)
plt.title('回溯直线搜索步长', fontsize=14)
plt.xlabel('迭代步数 k', fontsize=12)
plt.grid()
plt.subplot(1, 3, 3)
plt.plot(range(len(error_values)), error_values, 'o-')
plt.yscale('log')
plt.title('误差 $|x_k-x^*|$', fontsize=14)
plt.xlabel('迭代步数 k', fontsize=12)
plt.grid()
plt.tight_layout()
plt.show()Loading...
Loading...
Loading...
Loading...
k=0: e_(k+1) = 2.50e-01, e_k^2 = 2.50e-01
k=1: e_(k+1) = 6.25e-02, e_k^2 = 6.25e-02
k=2: e_(k+1) = 3.91e-03, e_k^2 = 3.91e-03
k=3: e_(k+1) = 1.53e-05, e_k^2 = 1.53e-05
k=4: e_(k+1) = 2.33e-10, e_k^2 = 2.33e-10
k=5: e_(k+1) = 0.00e+00, e_k^2 = 5.42e-20
k=6: e_(k+1) = 0.00e+00, e_k^2 = 0.00e+00
k=7: e_(k+1) = 0.00e+00, e_k^2 = 0.00e+00
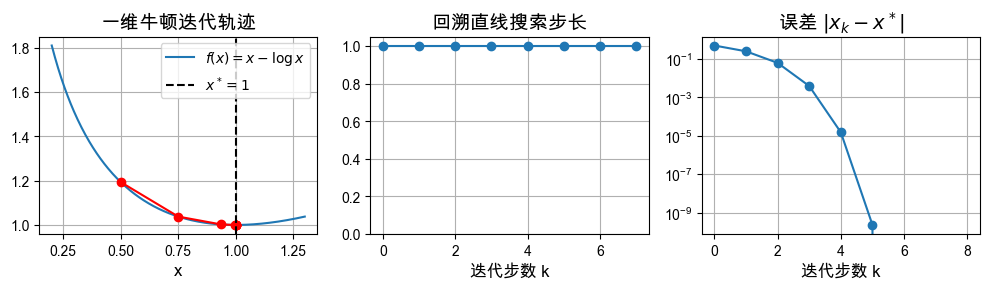
观察结果:
从 出发时,回溯直线搜索会持续接受 ,因此算法一直处于纯牛顿阶段。
误差满足 ,这正是课件里强调的二次收敛现象。
这个例子说明:当局部二次模型很准确时,牛顿法会非常快。
gamma = 10.0
f = lambda x: (x[0]**2 + gamma * x[1]**2) / 2
df = lambda x: np.array([x[0], gamma * x[1]])
hessian = lambda x: np.array([[1.0, 0.0], [0.0, gamma]])
prob = Problem(f=f, df=df, hessian=hessian)
prob.alpha = 0.05
prob.beta = 0.7
prob.tol = 1.0e-8
x0 = np.array([9.0, 2.0])
xmin, xmax, ymin, ymax = -5, gamma, -5, 5
prob.method = 'gradient'
trajectory_gd, runtime_gd, t_list_gd, _ = prob.solve(x0)
prob.method = 'newton'
trajectory_newton, runtime_newton, t_list_newton, decrement_list = prob.solve(x0)
print_large(f'梯度法运行时间:{runtime_gd * 1e3:.2f} ms')
print_large(f'牛顿法运行时间:{runtime_newton * 1e3:.2f} ms')
print_large(f'梯度法迭代步数:{len(trajectory_gd) - 1}')
print_large(f'牛顿法迭代步数:{len(trajectory_newton) - 1}')
print_large(f'牛顿减量初值:{decrement_list[0]:.3e}')
plt.figure(figsize=(11, 3.8))
plt.subplot(1, 3, 1)
plt.plot(trajectory_gd[:, 0], trajectory_gd[:, 1], 'rx-', label='梯度法')
plt.plot(trajectory_newton[:, 0], trajectory_newton[:, 1], 'bo-', label='牛顿法')
prob.plot_contour(xmin, xmax, ymin, ymax)
plt.title('二维二次函数上的迭代轨迹', fontsize=14)
plt.legend(fontsize=10)
plt.subplot(1, 3, 2)
plt.plot(np.linalg.norm(trajectory_gd, ord=2, axis=1), 'rx-', label='梯度法')
plt.plot(np.linalg.norm(trajectory_newton, ord=2, axis=1), 'bo-', label='牛顿法')
plt.yscale('log')
plt.title('误差 $|x_k-x^*|_2$', fontsize=14)
plt.xlabel('迭代步数 k', fontsize=12)
plt.grid()
plt.legend(fontsize=10)
plt.subplot(1, 3, 3)
plt.plot(range(len(t_list_gd)), t_list_gd, 'rx-', label='梯度法')
plt.plot(range(len(t_list_newton)), t_list_newton, 'bo-', label='牛顿法')
plt.title('回溯直线搜索步长', fontsize=14)
plt.xlabel('迭代步数 k', fontsize=12)
plt.ylim(0, 1.05)
plt.grid()
plt.legend(fontsize=10)
plt.tight_layout()
plt.show()
Loading...
Loading...
Loading...
Loading...
Loading...
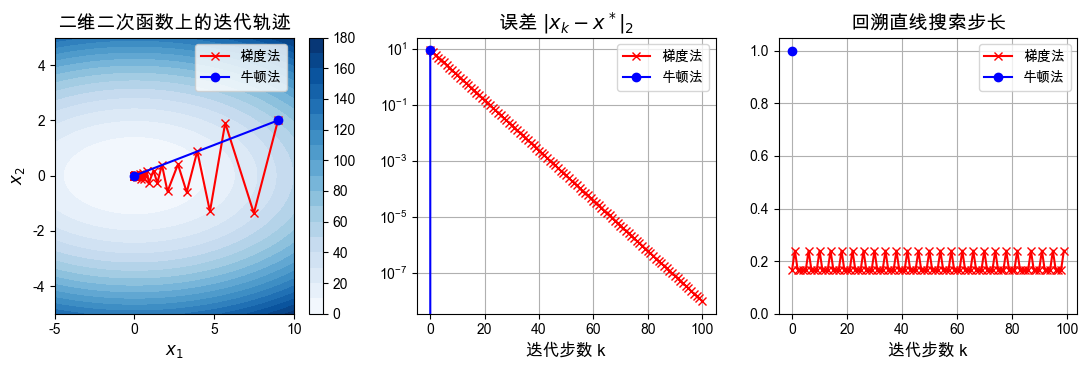
观察结果:
在二次函数上,牛顿法几乎立即到达极小值点。
这是因为这个问题的二阶模型就是原函数本身,牛顿步直接抓住了正确曲率。
梯度法虽然也收敛,但会经历明显更多的迭代。
f = lambda x: np.exp(x[0] + 3 * x[1] - 0.1) + np.exp(x[0] - 3 * x[1] - 0.1) + np.exp(-x[0] - 0.1)
df = lambda x: np.array([
np.exp(x[0] + 3 * x[1] - 0.1) + np.exp(x[0] - 3 * x[1] - 0.1) - np.exp(-x[0] - 0.1),
3 * np.exp(x[0] + 3 * x[1] - 0.1) - 3 * np.exp(x[0] - 3 * x[1] - 0.1)
])
hessian = lambda x: np.array([
[
np.exp(x[0] + 3 * x[1] - 0.1) + np.exp(x[0] - 3 * x[1] - 0.1) + np.exp(-x[0] - 0.1),
3 * np.exp(x[0] + 3 * x[1] - 0.1) - 3 * np.exp(x[0] - 3 * x[1] - 0.1)
],
[
3 * np.exp(x[0] + 3 * x[1] - 0.1) - 3 * np.exp(x[0] - 3 * x[1] - 0.1),
9 * np.exp(x[0] + 3 * x[1] - 0.1) + 9 * np.exp(x[0] - 3 * x[1] - 0.1)
]
])
prob = Problem(f=f, df=df, hessian=hessian)
prob.alpha = 0.1
prob.beta = 0.1
x0 = np.array([1.0, 1.0])
xmin, xmax, ymin, ymax = -1, 2, -1, 1.5
# 先用高精度牛顿法求一个近似最优解,用于后续误差作图。
prob.tol = 1.0e-20
prob.method = 'newton'
trajectory_ref, runtime_ref, _, _ = prob.solve(x0, max_iter=50)
x_star = trajectory_ref[-1]
p_star = prob.f(x_star)
# 再按常规容差比较梯度法和牛顿法。
prob.tol = 1.0e-10
prob.method = 'gradient'
trajectory_gd, runtime_gd, t_list_gd, _ = prob.solve(x0, max_iter=100)
prob.method = 'newton'
trajectory_newton, runtime_newton, t_list_newton, decrement_list = prob.solve(x0, max_iter=100)
gd_error = np.array([max(prob.f(item) - p_star, 1.0e-16) for item in trajectory_gd])
newton_error = np.array([max(prob.f(item) - p_star, 1.0e-16) for item in trajectory_newton])
safe_mask = newton_error[:-1] < 0.5
loglog_indices = np.where(safe_mask)[0]
loglog_error = np.log2(np.log2(1.0 / newton_error[:-1][safe_mask]))
print_large(f'近似最优解计算时间:{runtime_ref * 1e3:.2f} ms')
print_large(f'梯度法运行时间:{runtime_gd * 1e3:.2f} ms')
print_large(f'牛顿法运行时间:{runtime_newton * 1e3:.2f} ms')
print_large(f'梯度法迭代步数:{len(trajectory_gd) - 1}')
print_large(f'牛顿法迭代步数:{len(trajectory_newton) - 1}')
print_large(f'参考近似解 x^* = [{x_star[0]:.2f}, {x_star[1]:.2f}]')
plt.figure(figsize=(12, 6))
plt.subplot(2, 2, 1)
plt.plot(trajectory_gd[:, 0], trajectory_gd[:, 1], 'rx-', label='梯度法')
plt.plot(trajectory_newton[:, 0], trajectory_newton[:, 1], 'bo-', label='牛顿法')
prob.plot_contour(xmin, xmax, ymin, ymax)
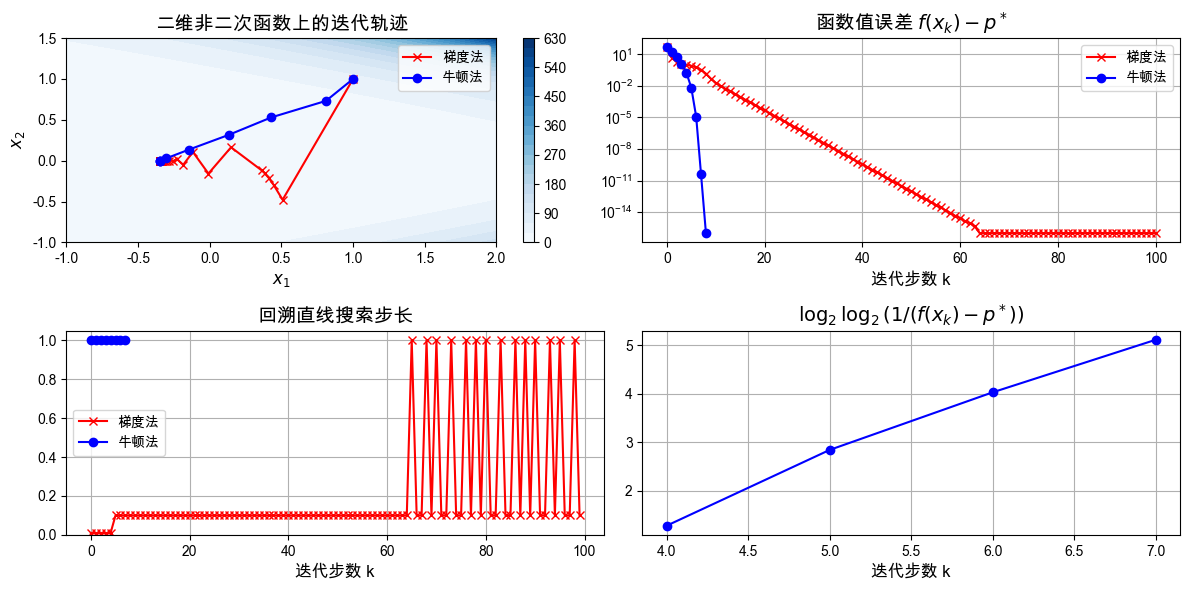
plt.title('二维非二次函数上的迭代轨迹', fontsize=14)
plt.legend(fontsize=10)
plt.subplot(2, 2, 2)
plt.plot(gd_error, 'rx-', label='梯度法')
plt.plot(newton_error, 'bo-', label='牛顿法')
plt.yscale('log')
plt.title(r'函数值误差 $f(x_k)-p^*$', fontsize=14)
plt.xlabel('迭代步数 k', fontsize=12)
plt.grid()
plt.legend(fontsize=10)
plt.subplot(2, 2, 3)
plt.plot(range(len(t_list_gd)), t_list_gd, 'rx-', label='梯度法')
plt.plot(range(len(t_list_newton)), t_list_newton, 'bo-', label='牛顿法')
plt.title('回溯直线搜索步长', fontsize=14)
plt.xlabel('迭代步数 k', fontsize=12)
plt.ylim(0, 1.05)
plt.grid()
plt.legend(fontsize=10)
plt.subplot(2, 2, 4)
plt.plot(loglog_indices, loglog_error, 'bo-')
plt.title(r'$\log_2\log_2(1/(f(x_k)-p^*))$', fontsize=14)
plt.xlabel('迭代步数 k', fontsize=12)
plt.grid()
plt.tight_layout()
plt.show()
print_large("\n\n牛顿减量变化情况:\n\n")
plt.figure(figsize=(6, 3.5))
plt.plot(decrement_list, 'o-')
plt.yscale('log')
plt.title(r'牛顿减量 $\lambda(x_k)$', fontsize=14)
plt.xlabel('迭代步数 k', fontsize=12)
plt.grid()
plt.tight_layout()
plt.show()
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
Loading...
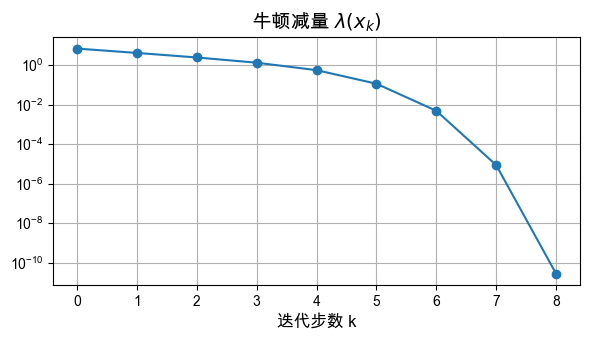
观察结果:
在非二次函数上,牛顿法不再一步到达最优点,但迭代次数仍明显少于梯度法。
当迭代进入真解附近后,函数值误差下降得非常快,这和局部二次收敛的理论一致。
图像近似线性,是课件中理论结论的一个数值迹象。
牛顿减量逐步变小,也说明算法正在逼近局部最优点。
总结¶
这个 notebook 验证或强调了三件事:
牛顿法本质上是在利用当前点附近的二阶信息修正梯度方向。
实际实现中通常采用阻尼牛顿法,即“牛顿方向 + 回溯直线搜索”。
一旦进入纯牛顿阶段,误差往往会呈现 的局部二次收敛。